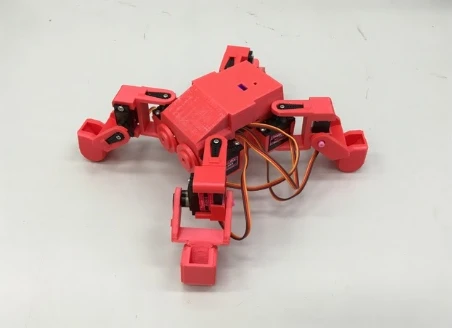
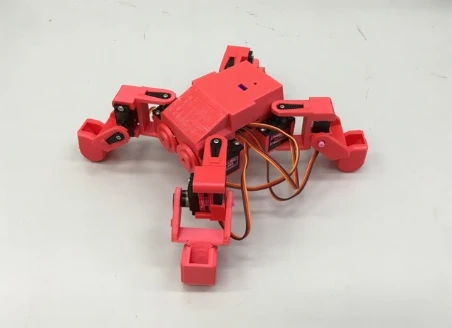
A Quadruped Robot is a four-legged walking machine inspired by the locomotion of animals such as dogs, cats, and spiders. It uses legged motion instead of wheels, giving it the ability to walk over rough terrain, climb small obstacles, and maintain high stability.
Quadrupeds demonstrate advanced biomechanics, servo coordination, and robotic gait control—making them highly educational and research-friendly.
This robot is typically built using 3D-printed parts, servo motors, and a microcontroller like Arduino, ESP32, or Raspberry Pi.
Key Features
1. 3-DOF or 2-DOF Legs
A standard quadruped robot uses:
- 3 DOF per leg → Hip yaw, hip pitch, knee pitch
- 2 DOF per leg (simpler version) → Hip pitch + knee
Total DOF:
- 8 DOF (basic)
- 12 DOF (advanced)
This allows:
- Smooth walking
- Turning
- Trotting
- Crawling
- Side-stepping
- Balancing motions
2. Precise Servo Control
Uses:
- High-torque servo motors (MG996R, MG90S, DS3218)
- PCA9685 16-channel servo driver for synchronized motion
- Battery supply (6V BEC or Li-ion pack)
Servos allow precise and repeatable joint movement.
3. Smart Microcontroller Brain
Supported controllers:
- Arduino Mega / Nano
- ESP32 (Wi-Fi + Bluetooth)
- Raspberry Pi (for vision or AI)
Optional sensors:
- MPU6050 (IMU) for balance
- Ultrasonic sensor
- IR sensors
- Camera (ESP32-CAM)
- Touch sensors
4. 3D-Printed Modular Structure
Most quadrupeds include:
- Central body frame
- Four leg modules
- Servo brackets
- Joint shafts
- Rubberized feet
You can print these parts using:
- PLA (simple)
- PETG (strong)
- ABS (durable)
5. Modes of Operation
- Manual remote control (Bluetooth)
- Wi-Fi web control
- Obstacle avoidance
- Autonomous walking
- Gait-based path following
- Camera-based navigation (advanced)
6. Gait Patterns
Predefined gaits include:
- Walk gait → slow & stable
- Trot gait → fast diagonal gait
- Creep gait → for rough terrain
- Side walk → crab movement
- Turn-in-place
Gaits are generated using:
- Inverse kinematics (IK)
- Predefined servo angle sequences
- Real-time feedback (IMU)
Applications
- Robotics engineering projects
- Bio-inspired locomotion research
- STEM education
- Autonomous exploration robots
- Obstacle-crossing robots
- Multi-servo programming learning
- AI/vision integration projects